刘凯斯 , 王彦兵, 宫辉力, 李小娟, 余洁
, 王彦兵, 宫辉力, 李小娟, 余洁
1. 首都师范大学 三维信息获取与应用教育部重点实验室,北京 100048
LIU Kaisi, WANG Yanbing, GONG Huili, LI Xiaojuan, YU Jie
通讯作者:
收稿日期: 2017-10-17
修回日期: 2018-02-28
网络出版日期: 2018-04-20
版权声明: 2018 《地球信息科学学报》编辑部 《地球信息科学学报》编辑部 所有
基金资助:
作者简介:
作者简介:刘凯斯(1989-),女,博士生,研究方向为基于LiDAR点云数据的三维空间建模与分析。E-mail: 994761911@qq.com
展开
摘要
机载LiDAR是获取地表DEM的重要技术之一。本文针对机载LiDAR点云数据在复杂城区环境下的大型建筑及低矮地物滤波问题,提出一种新的二面角滤波法。利用空间二面角的平面角可以表达空间两相交平面相对位置的原理,实现机载LiDAR点云数据滤波。首先,算法提取点云数据中的高程突变点,以非突变点的二面角余弦均值稳定性作为判定迭代结束的条件;其次,分别统计高程突变和非突变点集的二面角余弦值频率分布,以交点处对应余弦值和最后一次迭代的坡度值作为LiDAR点云滤波的判定条件;最后,利用数学形态学“开”算子,去除残留低矮植被,得到可靠的滤波结果。对同一区域机载LiDAR点云数据,通过“二面角法”与“渐进三角网法”进行滤波处理。实验结果表明,二面角滤波法能有效地降低地物点错分为地面点的百分率,且在去除地物信息的同时能良好地保留地形特征。
关键词:
Abstract
Airborne LiDAR is one kind of the technologies for obtaining ground surface DEM. On the analysis of the airborne LiDAR point cloud filtering algorithms, this paper proposes a new filtering algorithm-dihedral filtering. The algorithm is based on the theory that can express the relative position of two intersect planes in space, to achieve the airborne LiDAR point cloud data filtering process. Firstly, the elevation-mutate points are extracted from point cloud data. The iteration ends when the stability of the cosine of non-mutated points′ dihedral angle reaches required level. Then, the frequency distributions of the cosine of both mutated and non-mutated points′ dihedral angle are counted, and draws a line chart. Ground points and non-ground points are classified based on the intersection′s cosine of line chart and slope value of the last iteration. Finally, the open operator of the mathematical morphology is used to remove low vegetation, and the reliable results are obtained. Comparing with ′Progressive TIN Method′, the misjudged percentage of the non-ground points were effectively reduced. Dihedral method can retain topographical information while filtering terrestrial object information.
Keywords:
机载激光测距技术可高效、快速获取高空间分辨率的地表三维信息,广泛应用于地形测绘、城市建模等多个领域[1,2,3]。原始机载LiDAR点云的数据结构是离散、不规则的,包括地面点和非地面点[4]。高精度分离地面点与非地面点的过程即滤波处理,是制作DTMs的关键技术[5]。现有的机载LiDAR点云数据滤波方法,主要分为:坡度滤波法[6,7]、移动窗口法[8]、数学形态学法[9,10]、渐进三角网(Triangulated Irregular Network, TIN)滤波法[11,12]及其他滤波方法[13,14,15,16]。
Foerstner等[17]提出基于灰度值的数学形态学滤波算法,使用“开”算子去除局部窗口内的地物点,实现滤波;该算法程序简单、易于实现,但需获取最大建筑物尺寸、建筑物最低高程等先验知识,自动化程度较低。Vosselman[18]提出坡度滤波算法,引入坡度因子判定非地面点;Sithole等[19]、Yi Chenshao等[20]改进了该算法,以自适应地形坡度变化;坡度算法需针对不同地形设置有效阈值,在处理地形不连续、低矮植被等情况时误差较大。门林杰等[6]采用规则格网方式组织数据,通过比较格网最低点与邻域最低点的坡度得到预设地形,再对格网任一点与邻域最低点的坡度进行判断,获得可靠的地形信息;该方法提高了滤波效率且可良好处理地形不连续情况,但低矮植被的识别误差仍较大。张宁宁等[21]结合区域生长原理改进坡度滤波法,用于地形较为平坦的城市区域,但对低矮植被、汽车等小型地物的滤波精度不高。综上,经典滤波算法易于滤除大型建筑,但难于识别低矮地物。
本文针对复杂城市区域低矮地物滤波精度不高的现状,提出一种机载LiDAR点云数据滤波的方法—二面角滤波法。利用空间二面角的平面角可以表达空间两相交平面相对位置的原理,实现点云数据的滤波。采用二面角余弦均值的稳定性作为高程突变与非突变点提取的终止条件;基于坡度滤波法在低矮地物识别方面的劣势,提出以首次高程非突变点二面角余弦值频率大于突变点频率时对应的二面角余弦,结合高程突变点迭代结束时对应的坡度,共同作为点云滤波的判定条件;最后,利用数学形态学“开”算子,去除残留低矮植被,得到高精度、可靠的LiDAR点云滤波结果。
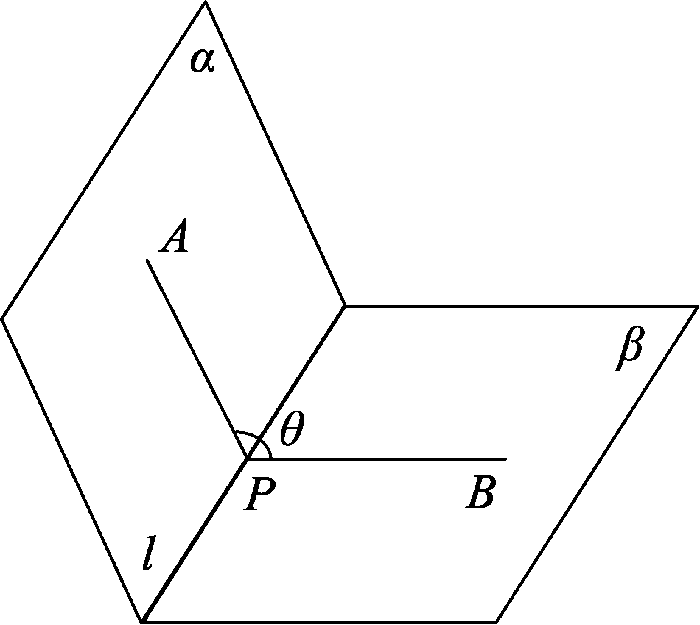
从空间任一直线(l)出发的2个半平面(α、β)所组成的图形叫作二面角。以l上任一点P为端点,在两半平面α和β内分别作垂直于l的2条射线PA、PB,∠APB(θ)称之为二面角的平面角。本文限定二面角的大小介于[0°,180°][22],并以二面角的平面角余弦值判定角度大小(图1)。
Sithole和Vosselman[19]将地形定义为分段连续的曲面片拼接成的曲面。在实际地形中,相邻两平面的二面角通常位于区间[90°,180°],对于密集植被和建筑物,其内部的高程变化相对平缓,而其边界处,存在高程突变。
已知A(x1, y1, z1)、B(x2, y2, z2)、p(x3, y3, z3)3点坐标,
二面角θ余弦值的计算公式为:
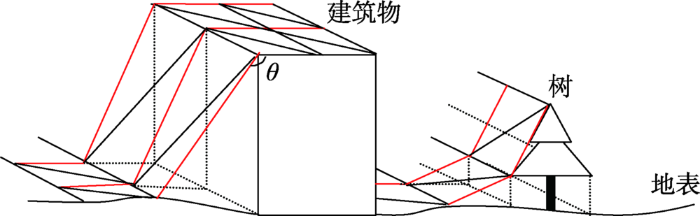
根据空间中任意相交两平面的二面角平面角大小可确定两平面的相对位置,如图2所示。对于规则格网的机载LiDAR数据,每两相交线所成的夹角θ,即空间二面角的平面角;其越接近180°,地表高程变化越平缓,越接近90°,高程变化越急剧。其余弦值cosθ则随着地面变化由平缓到起伏在[0, 1]间单调递减。
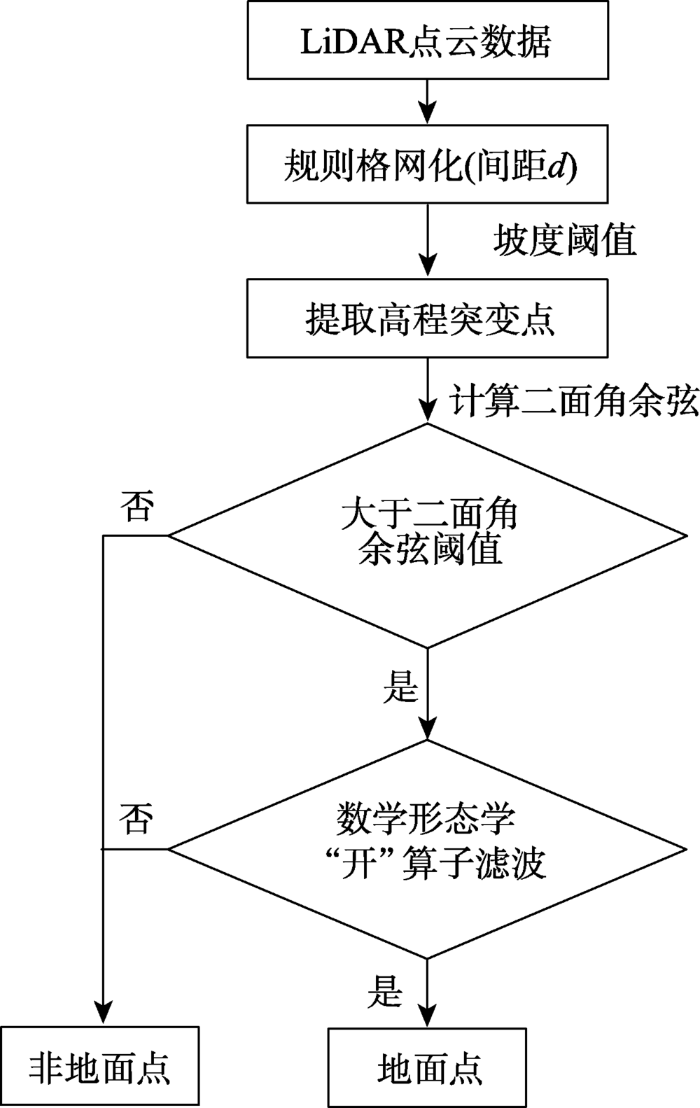
根据上述原理,设计了二面角滤波算法流程(图3)。
图3 二面角法点云滤波流程图
Fig. 3 Flowchart of airborne LiDAR point cloud filtering based on dihedral angel
(1)原始LiDAR数据采用规则格网方式存储,遍历数据集,记录每一格网单元内最低高程值。对于有多次回波的点,仅保留末次回波高程;高程过高或过低的粗差点,不被记录。
(2)设置初始坡度阈值为72°,随着多次迭代高程突变点被逐步提取,坡度阈值逐渐减小,当相邻两2次迭代二面角余弦均值增长小于0.5%时,迭代结束。
(3)计算高程突变点、非突变点的二面角余弦,获得相应频率分布。以首次高程非突变点二面角余弦频率大于突变点频率时对应的二面角余弦值(COSmin),及步骤(2)中获取的坡度值(Smax),共同作为滤波的判定条件。
(4)采用数学形态学“开”算子,滤除残余低矮地物,得到可靠的滤波结果。
2.2.1 数据预处理
二面角滤波法首先将点云数据规则格网化,使用一个格网间距等于点云平均间隔的二维格网覆盖在点云数据上,判断每个机载LiDAR点所在格网单元的编号,公式如下:
式中:(Xi, Yi)代表格网编码;(x, y)是点云平面坐标;(Xmin, Ymin)代表实验区最小坐标;d为格网单元尺度。
2.2.2 高程突变点提取
基于Vosselmanly等[19]提出的两点间坡度越大且高程值越大的点是地面点几率越小的原理,利用坡度阈值进行高程突变点提取。首次坡度阈值为72°(斜率约为3)[21],在后续迭代过程中,随着高程变化剧烈的地物点被逐步识别,坡度阈值逐渐减小。
以非高程突变点的二面角余弦均值稳定性,作为迭代结束的判定条件。当相邻2次迭代的二面角余弦均值增长小于0.5%时,迭代结束(表1)。
表1 二面角余弦值
Tab. 1 The cosine of dihedral angle
| 迭代次数/次 | |||||
|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | |
| 斜率阈值 | 3.3 | 2.5 | 2 | 1.6 | 1.3 |
| 二面角余弦均值 | 0.909 | 0.917 | 0.925 | 0.929 | 0.932 |
单次高程突变点提取算法步骤如下:
(1)设置坡度阈值S,判定标识Label,0为非高程突变点,1为高程突变点(初始值Label=0)。
(2)顺序遍历格网,计算dk与左邻点和下邻点的坡度值,当坡度最小值大于S时,Label=1。
2.2.3 二面角滤波阈值确定
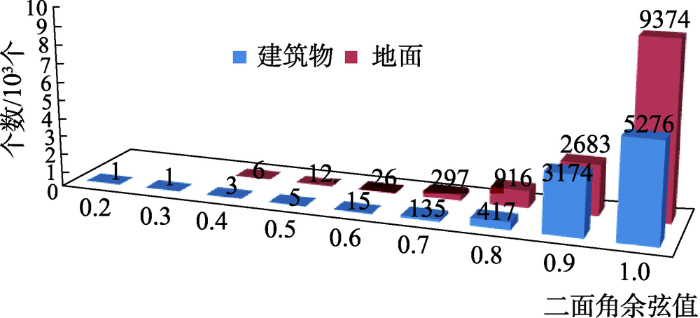
经高程突变点提取的机载LiDAR点云数据被分成2个点集。非高程突变点间的高程变化较为平缓,如图4实验数据1统计结果所示(0.2处直方图表示二面角余弦值出现在(0.1,0.2]间数据点的个数),地面、建筑区域内部LiDAR数据点间相对位置变化小,二面角余弦值接近1,且二面角频数分布相似。因此,本文算法将建筑内部的相对位置变化与地面引起的位置改变等同处理。而高程突变点邻域的二面角余弦值小,这是地物与地面之间过渡导致的高程突变。
图4 建筑物和地面的二面角余弦分布范围
Fig. 4 Distribution range of dihedral angle cosine for buildings and grounds
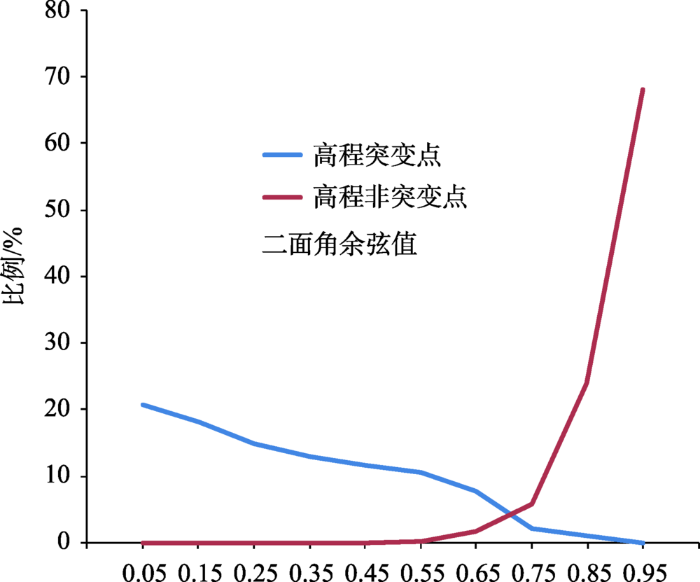
分别统计高程突变和非突变点集的二面角余弦频率分布,如图5所示(实验数据1统计结果):高程突变点集的二面角余弦集中分布在[0, 0.7]之间,仅不到3%的数据点二面角余弦在(0.7, 1]之间;而高程非突变点集的二面角余弦虽集中分布于 [0.7, 1]之间,呈单调递增趋势,但仍有大于6%的数据点余弦值小于0.7。
图5 高程突变和非突变点二面角余弦值频率统计
Fig. 5 Frequency statistics of dihedral angle cosine for elevation mutation and non-mutation points
由此可知:经坡度阈值确定的高程突变、非突变点具有一定程度的错误分类,尤其非突变点的误判概率较大,且单一坡度阈值滤波法对低矮地物的识别能力较差,因此本文提出以首次高程非突变点二面角余弦值频率大于突变点频率时对应的二面角余弦(COSmin),结合2.2.2节高程突变点迭代结束时对应的坡度(Smax),共同作为LiDAR点云滤波的判定条件。
因坡度(Smax)和二面角余弦(COSmin)迭代存在误差,设坡度值标准差为αs,二面角余弦标准差为θs,增加一个95%的置信区间(式(4)),滤波函数为:
具体滤波步骤如下:
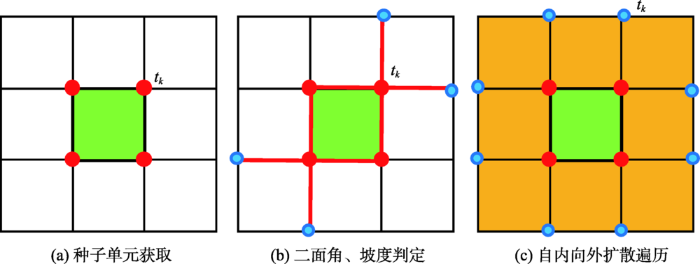
(1)设置未遍历的格网数据集P=T={t1, t2, …, tn}。统计每个格网单元四角点高程之和Ci,设置P中最小Ci对应的格网单元四角点为种子点[10]。如图6(a)所示,4个红色角点为种子点。
(2)采用自内向外扩散的遍历方式。如图6(b)所示,计算tk的水平(竖直同理)二面角余弦、坡度值。若cosi大于ΔCOS,且Si小于ΔS,则待定点为地面点;若cosi小于ΔCOS,或Si大于ΔS,待定点为非地面点,将该点高程用8邻域内已判定为地面点的高程均值替代。
(3)将新判定的点作为种子点,并将这些点从数据集P中去除(图6(c)外围的点)。重复步骤(2),直至全部格网点判定完毕,P为空集。
2.2.4 小地物的去除
经二面角法滤波后的LiDAR点云数据,大地物已基本移除,但仍存在少量低矮地物(如小灌木等)。对于这些小地物,本文使用数学形态学“开”算子(式(5))进行滤除,设置4
式中:
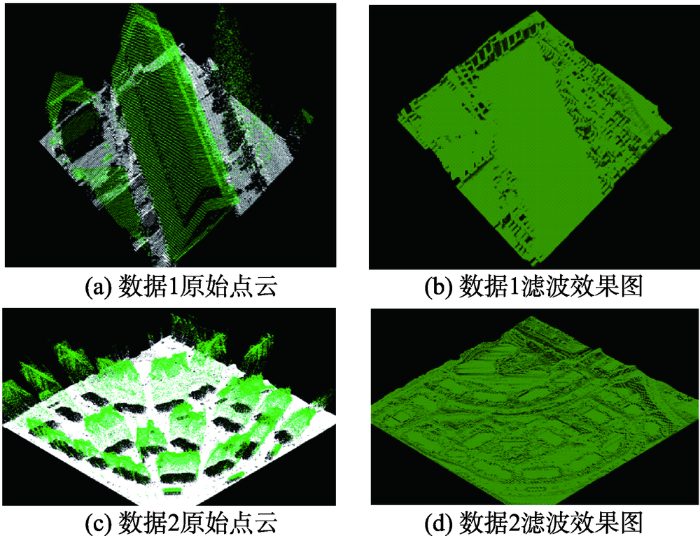
本文选择了2块机载LiDAR点云数据作为试验区,数据1为海地太子港市区的局部点云,数据2为美国印第安纳州诺布尔斯维尔市区的局部点云数据(图7)。数据包含空间坐标、强度、GPS时间、回波次数、第几次回波等12个字段,平均点距约为1.5 m。其中,实验区1的范围为278 m
本文采用C++语言在VS 2013平台上实现了基于二面角的机载LiDAR点云数据滤波算法(电脑配置为Windows 7, 2.4 GHz主频,8 GB内存),实验区1滤波时间为3.1 s,实验区2滤波时间为15.7 s。
分析一种滤波方法性能的好坏,重要指标是统计出现的I类、II类误差概率,I类误差(Type I)是地面点被错误分为地物点的百分比率,II类误差(Type II)是地物点被错误分为地面点的百分比率,总误差是I类、II类误差之和与总机载LiDAR点数的百分比率[4](式(6)-(8))。
式中:a是错误分类为地物点的地面点数目;b是正确分类的地面点数;c是将地物点分类为地面点的点数;d是正确判断的地物点数目。
对滤波后的实验区点云数据进行误差统计 (式(6)-(8)),并与“渐进三角网法[12]”进行对比,得到的精度评价结果如表2所示。
表2 滤波精度评价表
Tab. 2 Accuracy assessment for filtering algorithm
| 滤波结果误差统计 | 实验区1 | 实验区2 | |||
|---|---|---|---|---|---|
| 二面角滤波法 | 渐进三角网法 | 二面角滤波法 | 渐进三角网法 | ||
| a | 678 | 3518 | 1583 | 7961 | |
| b | 28 171 | 144 296 | 63 298 | 324 108 | |
| c | 760 | 4824 | 1686 | 10 840 | |
| d | 25 761 | 131 075 | 58916 | 294 547 | |
| Type I Error/% | 2.35 | 2.38 | 2.43 | 2.4 | |
| Type II Error/% | 2.87 | 3.55 | 2.78 | 3.55 | |
| Total Error/% | 2.60 | 2.94 | 2.61 | 2.95 | |
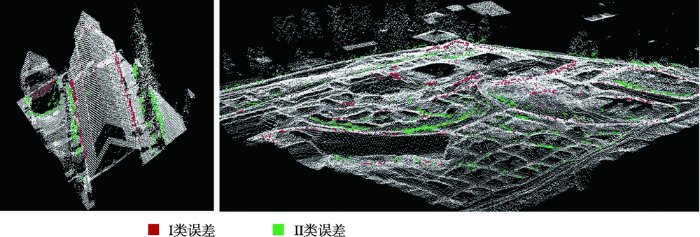
如表2、图8(误差分布点云图)所示,由误差分布图可知,I类误差主要分布于区域内高程较高处,II类误差的产生主要受低矮植被影响。本文算法的I类误差和渐进三角网法相当,但II类误差有所改善,这表明二面角算法能在正确滤除地物点,保留地面信息的同时,兼顾小面积、低矮地物的去除。
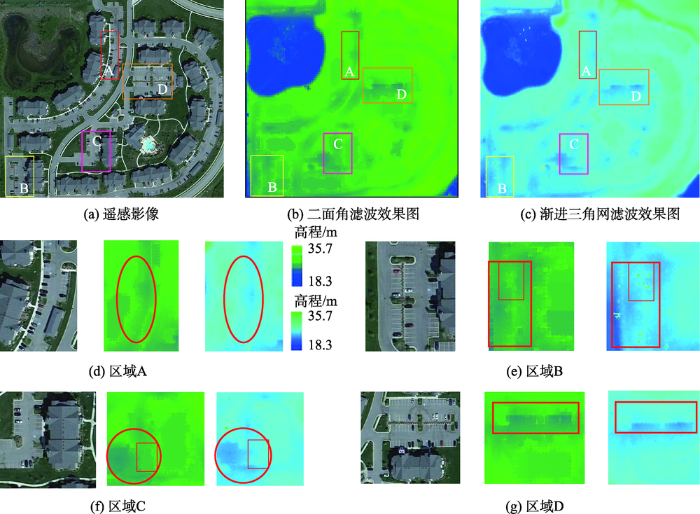
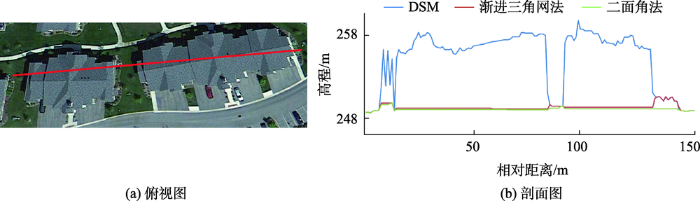
为进一步验证本文算法的实用效果,以数据2为例进行对比试验。实验区中的地物主要包含建筑物、汽车、高矮不一的树、灌木。如图9所示,A区域地物为汽车,B、C、D区域地物为低矮植被。图10为实验数据2的局部俯视图和分别采用渐进三角 网[12]、二面角法滤波后的高程值剖面图。
图9 二面角滤波和渐进三角网滤波方法对比分析
Fig. 9 Comparison of two kinds of filtering methods: Dihedral and TIN filters
图10 数据2的局部俯视图、剖面图
Fig. 10 Top view and sectional view of the area for experiment 2
比较2种方法的滤波结果及剖面图可知,2种算法均能有效滤除建筑等大型地物,但相较于三角网滤波法,二面角法滤波后的地面点高程变化更为缓慢、精细,对植被的滤除效果更好。
图9中A、B、C区域中的汽车、低矮灌木,以及图10剖面图中右侧的低矮植被,渐进三角网算法均未能识别、去除;而本文二面角滤波法,对于地形起伏程度的敏感性好,能较好地保留地形信息,滤除低矮地物。当然,本文算法同样存在着不足之处,如图8中D区域内条状植被(高差42 cm),本文算法与渐进三角网算法均未能识别此地物,从而将地物点错误地判断为地面点,这说明本文方法在二面角滤波后,进一步“精”滤波时的判定规则仍需加强。
本文针对机载LiDAR点云数据在复杂城区环境下的大型建筑及低矮地物滤波问题,提出一种新的二面角滤波法。利用空间二面角的平面角可以表达空间两相交平面相对位置的原理,实现机载LiDAR点云数据滤波。得到以下结论:
(1)采用二面角余弦均值的稳定性作为高程突变与非突变点提取的终止条件;基于坡度滤波法在低矮地物识别方面的劣势,提出以首次高程非突变点二面角余弦值频率大于突变点频率时对应的二面角余弦,结合高程突变点迭代结束时对应的坡度,共同作为点云滤波的判定条件;最后,利用数学形态学“开”算子,去除残留低矮植被。得到高精度、可靠的LiDAR点云滤波结果。
(2)对海地太子港市区点云数据进行“二面角法”、“渐进三角网法”滤波实验,结果表明,二面角滤波法能有效地降低地物点错分为地面点的百分率,且在去除地物信息的同时能良好地保留地形 特征。
The authors have declared that no competing interests exist.
| [1] |
基于LiDAR数字高程模型构建的数学形态学滤波方法综述 [J].Review on morphological filtering algorithms based om LiDAR digital elevation model construction [J]. |
| [2] |
Airborne laser scanning-present status and future expectations [J].https://doi.org/10.1016/S0924-2716(99)00009-X URL [本文引用: 1] 摘要
Not Available
|
| [3] |
Airborne laser scanning: Existing systems and firms and other resources [J].https://doi.org/10.1016/S0924-2716(99)00016-7 URL [本文引用: 1] 摘要
ABSTRACT Z. This article gives an overview of resources on airborne laser scanning ALS . The main emphasis is on existing systems and firms, especially commercial ones. Through a very time-consuming search and with the help of numerous persons from firms, organisations and other colleagues, a quite complete survey of existing commercial systems, including detailed system parameters, has been compiled. This survey is by far the most complete and up-to-date information available today on commercial ALS. Additional data on contact information, links and, in some cases, a short background is given for firms Z. involved in ALS manufacturers, service providers, owners . A summary of other non-commercial and research systems, mainly of NASA, and respective links is presented. Finally, some other useful WEB links are given. The developments in ALS have been very rapid the last 1--2 years. This overview reflects these developments and describes rather completely the current situation, thus, being usefu...
|
| [4] |
基于car(p,q)模型和数学形态学理论的LiDAR点云数据滤波 [J].
在分析现有的LiDAR点云数据后处理方法的基础上,本文提出了一种点云数据“分步”滤波方法。首先对LiDAR点云数据进行数学形态学“粗”滤波,得到“地面点假设”和“非地面点假设”。然后引入顾及因果关系的自回归模型(car)对两类点云数据假设进行模型化处理和假设检验,根据假设检验的结果判断地面点和非地面点,最终得到可靠的分类结果。与单纯的“最小二乘拟合预测法”或“数学形态学”方法相比,这种“分步”处理的思想用于LiDAR点云数据分类处理的结果更可靠。
YangY. Filtering of airborne LiDAR point cloud data based on car(p,q) model and mathematical morphology [J].
在分析现有的LiDAR点云数据后处理方法的基础上,本文提出了一种点云数据“分步”滤波方法。首先对LiDAR点云数据进行数学形态学“粗”滤波,得到“地面点假设”和“非地面点假设”。然后引入顾及因果关系的自回归模型(car)对两类点云数据假设进行模型化处理和假设检验,根据假设检验的结果判断地面点和非地面点,最终得到可靠的分类结果。与单纯的“最小二乘拟合预测法”或“数学形态学”方法相比,这种“分步”处理的思想用于LiDAR点云数据分类处理的结果更可靠。
|
| [5] |
机载激光雷达测量技术理论与方法 [M].Theory and Method of Airborne Lidar Measurement Technology [M]. |
| [6] |
基于改进的坡度滤波算法的LiDAR数据滤波 [J].Filtering of LiDAR data based on modified slope filtering algorithm [J]. |
| [7] |
基于多尺度虚拟网格的LiDAR点云数据滤波改进方法 [J].Improved method for LiDAR point cloud filtering based on hierarchical pseudo-grid [J]. |
| [8] |
Result of the OEEPEWG on laser data acquisition [J]. |
| [9] |
Analysis of laser scanner data by means of digital image processing techniques [M]. |
| [10] |
考虑区域增长与数学形态学的LiDAR多次回波数据滤波 [J].Filtering multiple returns of LiDAR data based on region growing and mathematical morphology [J]. |
| [11] |
DEM generation from laser scanner data using adaptive TIN models [J].
Peter Axelsson 61 Calculate initial parameters using all data 61 Select seed points 61 Iterative densification of the TIN 61 Calculate parameters for each iteration from points included in the TIN 61 Add points to the TIN if below threshold values 61 Continue until all points are classified as ground or
|
| [12] |
基于高程突变TIN的改进机载LiDAR点云滤波算法 [J].
在研究高程突变TIN的滤波算法基础上,对该算法进行了改进。首先,进行粗差剔除,之后以Mean Shift算法进行点云分类,并分块构造D-TIN,分别设置动态坡度阈值;最后,对滤波结果进行定性与定量分析。实验表明:改进的算法能够有效地滤除原算法中不能滤除的植被及其他地物,提高了滤波的准确性。
Improved TIN filtering based on height jump for LiDAR piont clouds date [J].
在研究高程突变TIN的滤波算法基础上,对该算法进行了改进。首先,进行粗差剔除,之后以Mean Shift算法进行点云分类,并分块构造D-TIN,分别设置动态坡度阈值;最后,对滤波结果进行定性与定量分析。实验表明:改进的算法能够有效地滤除原算法中不能滤除的植被及其他地物,提高了滤波的准确性。
|
| [13] |
Two-step adaptive extraction method for ground points and breaklines from LIDAR point clouds [J].https://doi.org/10.1016/j.isprsjprs.2016.07.002 URL [本文引用: 1] 摘要
The extraction of ground points and breaklines is a crucial step during generation of high quality digital elevation models (DEMs) from airborne LiDAR point clouds. In this study, we propose a novel automated method for this task. To overcome the disadvantages of applying a single filtering method in areas with various types of terrain, the proposed method first classifies the points into a set of segments and one set of individual points, which are filtered by segment-based filtering and multi-scale morphological filtering, respectively. In the process of multi-scale morphological filtering, the proposed method removes amorphous objects from the set of individual points to decrease the effect of the maximum scale on the filtering result. The proposed method then extracts the breaklines from the ground points, which provide a good foundation for generation of a high quality DEM. Finally, the experimental results demonstrate that the proposed method extracts ground points in a robust manner while preserving the breaklines.
|
| [14] |
基于小波多分辨率方向高程限差的LiDAR数据滤波 [J].Filter of LiDAR data based on wavelet multi-resolution and directional height tolerance [J]. |
| [15] |
基于正交多项式的平原城区机载LiDAR数据滤波算法 [J].
从机载LiDAR点云数据中分 离地面点与非地面点生成城区DEM,是构建数字城市的首要工作。该文对机载LiDAR数据处理中的滤波关键算法进行了研究。首先,利用常用的区域增长方法 对机载LiDAR点云数据进行了滤波处理,然后基于正交多项式分带滤波方法进行了点云滤波,比较了两种算法的运行效率,分析了二者的特点,并通过试验对比 进行了阈值参数优选,试验表明该算法具有较好的滤波效果,在平原城区的数字城市三维建模中具有很好的应用价值。
Orthogonal polynomial filtering algorithm for plain urban airborne LiDAR data [J].
从机载LiDAR点云数据中分 离地面点与非地面点生成城区DEM,是构建数字城市的首要工作。该文对机载LiDAR数据处理中的滤波关键算法进行了研究。首先,利用常用的区域增长方法 对机载LiDAR点云数据进行了滤波处理,然后基于正交多项式分带滤波方法进行了点云滤波,比较了两种算法的运行效率,分析了二者的特点,并通过试验对比 进行了阈值参数优选,试验表明该算法具有较好的滤波效果,在平原城区的数字城市三维建模中具有很好的应用价值。
|
| [16] |
基于多分辨率层次分类的机载LiDAR点云滤波方法 [J].Airborne LiDAR data filtering method based on multi-resolution hierarchical classification [J]. |
| [17] |
Towards automatic building extraction form high resolution digital elevation models [J].https://doi.org/10.1016/0924-2716(95)98236-S URL [本文引用: 1] 摘要
This paper deals with an approach for extracting the 3D shape of buildings from high-resolution Digital Elevation Models (DEMs), having a grid resolution between 0.5 and 5 m. The steps of the proposed procedure increasingly use explicit domain knowledge, specifically geometric constraints in the form of parametric and prismatic building models. A new MDL-based approach generating a polygonal ground plan from segment boundaries is given. The used knowledge is object-related making adaption to data of different density and resolution simple and transparent.
|
| [18] |
Slope based filtering of laser altimetry data [J].
ABSTRACT Laser altimetry is becoming the prime method for large scale acquisition of height data. Although laser altimetry is full integrated into processes for the production of digital elevation models in different countries, the derivation of DEM's from the raw laser altimetry measurements still causes problems. In particular the laser pulses reflected on the ground surface need to be distinguished from those reflecting on buildings and vegetation. In this paper a new method is proposed for filtering laser data. This method is closely related to the erosion operator used for mathematical grey scale morphology. Based on height differences in a representative training dataset, filter functions are derived that either preserve important terrain characteristics or minimise the number of classification errors. In experiments it is shown that the latter filter causes smaller errors in the resulting digital elevation models. In general the performance of the filters deteriorates with a decreasing point density.
|
| [19] |
Experimental comparison of filter algorithms for bare-earth extraction from airborne laser scanning point clouds [J].https://doi.org/10.1016/j.isprsjprs.2004.05.004 URL [本文引用: 3] 摘要
Over the past years, several filters have been developed to extract bare-Earth points from point clouds. ISPRS Working Group III/3 conducted a test to determine the performance of these filters and the influence of point density thereon, and to identify directions for future research. Twelve selected datasets have been processed by eight participants. In this paper, the test results are presented. The paper describes the characteristics of the provided datasets and the used filter approaches. The filter performance is analysed both qualitatively and quantitatively. All filters perform well in smooth rural landscapes, but all produce errors in complex urban areas and rough terrain with vegetation. In general, filters that estimate local surfaces are found to perform best. The influence of point density could not well be determined in this experiment. Future research should be directed towards the usage of additional data sources, segment-based classification, and self-diagnosis of filter algorithms.
|
| [20] |
Automated searching of ground points from airborne Lidar data using a climbing and sliding method [J].https://doi.org/10.14358/PERS.74.5.625 URL [本文引用: 2] 摘要
Abstract The extraction of a digital elevation model (DEM) from airborne lidar point clouds is an important task in the field of geoinformatics. In this paper, we describe a new automated scheme that utilizes the so-called “climbingand-sliding” method to search for ground points from lidar point clouds for DEM generation. The new method has the capability of performing a local search while preserving the merits of a global treatment. This is done by emulating the natural movements of climbing and sliding in order to search for ground points on a terrain surface model. To improve efficiency and accuracy, the scheme is implemented with a pseudo-grid data and includes a back selection step for densification. The test data include a dataset released from the ISPRS Working Group III/3 and one for a mountainous area located in southern Taiwan. The experimental results indicate that the proposed method is capable at producing a high fidelity terrain model.
|
| [21] |
基于坡度和区域生长的城市LiDAR点云滤波方法 [J].https://doi.org/10.3969/j.issn.1672-4623.2016.03.010 URL [本文引用: 2] 摘要
在分析坡度滤波算法原理的基础上,结合区域生长原理进行改进;选取国际摄影测量与遥感学会提供的部分城市滤波样本数据进行实验,将实验结果与Roggero坡度滤波算法和Sithole坡度滤波算法的结果进行比较。结果表明,该方法能较好地降低一类误差,对城市Li DAR点云建筑区数据有一定的适用性。
Filtering method of urban LiDAR point cloud based on slope and region growing algorithm [J].https://doi.org/10.3969/j.issn.1672-4623.2016.03.010 URL [本文引用: 2] 摘要
在分析坡度滤波算法原理的基础上,结合区域生长原理进行改进;选取国际摄影测量与遥感学会提供的部分城市滤波样本数据进行实验,将实验结果与Roggero坡度滤波算法和Sithole坡度滤波算法的结果进行比较。结果表明,该方法能较好地降低一类误差,对城市Li DAR点云建筑区数据有一定的适用性。
|
| [22] |
一种基于分割的机载LiDAR点云数据滤波 [J].
In dealing with the problem that most current filtering algorithms excessively erode the bare earth at discontinuities or place with complex buildings,we present a new filtering algorithm based on segmentation.Firstly the original point cloud is segmented into many segments based on the continuity of terrain surface.Then,the ground point set is differed from non-ground point set using the way of establishing buffer area after gross error points remove by the number of segment.Finally,we get the filtering effect after several iterations.The experimental results show that this algorithm significantly improves the classification accuracy of ground points compared with other classical filters.This algorithm effectively preserves the ground information when filter kinds of object information.In addition comparing with the filtering effect of Terrascan software,the filtering effect of the proposed algorithm is better in removing vegetation and preserving the point in the edge of ground.
Filtering of LiDAR based on segmentation [J].
In dealing with the problem that most current filtering algorithms excessively erode the bare earth at discontinuities or place with complex buildings,we present a new filtering algorithm based on segmentation.Firstly the original point cloud is segmented into many segments based on the continuity of terrain surface.Then,the ground point set is differed from non-ground point set using the way of establishing buffer area after gross error points remove by the number of segment.Finally,we get the filtering effect after several iterations.The experimental results show that this algorithm significantly improves the classification accuracy of ground points compared with other classical filters.This algorithm effectively preserves the ground information when filter kinds of object information.In addition comparing with the filtering effect of Terrascan software,the filtering effect of the proposed algorithm is better in removing vegetation and preserving the point in the edge of ground.
|

/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}